Durante el actual curso se está llevando a cabo la elaboración de un proyecto de innovación educativa por parte de profesorado y alumnado del IES Politécnico.

El nombre del proyecto es: “PoliROBOT. Fabricación con metodología STEAM de un robot autosuficiente gestionado con una APP móvil propia”
El objetivo final de este proyecto es calcular, analizar, diseñar, verificar y montar un robot que además se desplazará gracias al autoabastecimiento eléctrico generado por paneles solares y mediante una app de radiocontrol.
Las partes que contendrá el robot serán las siguientes:
1. Diseño del robot
2. Cálculo e instalación de las placas solares
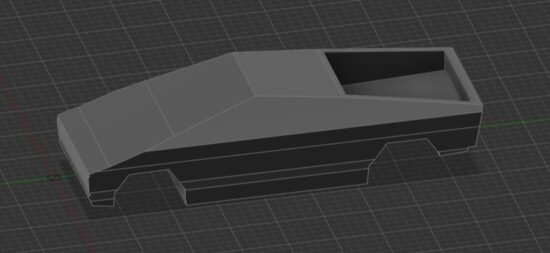
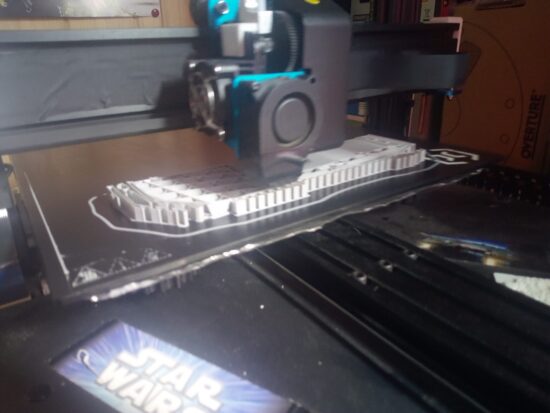
3. Fabricación de la estructura en CNC e impresión 3D
4. Montaje de la estructura y elementos mecánicos.
5. Programación de la placa de control.
6. Conexionado y pruebas electromecánicas.
7. Programación de APP para radiocontrol.
8. Pruebas de funcionamiento del conjunto.
9. Difusión
Se trata de un proyecto transversal a Ciclos Formativos y Bachillerato. En el proyecto, se interconectan los contenidos y competencias de los diferentes ciclos y Bachillerato con un objetivo común.
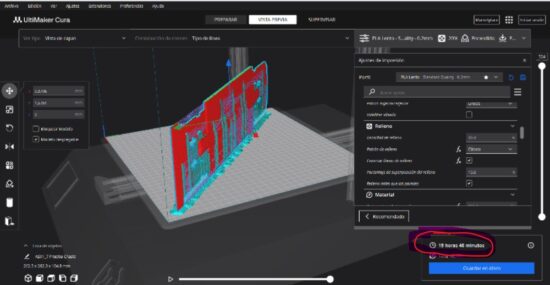
Las aplicaciones CAD/CAM que se utilizan en los CFGM de Mecanizado y CFGS en Construcciones Metálicas, sirven para diseñar productos y programar los procesos de fabricación, en concreto, para el mecanizado CNC o para la impresión 3D. Las grandes ventajas que ofrece un CAD-CAM incluyen una mayor productividad y un flujo de trabajo optimizado para su proceso de fabricación CNC o impresión 3D que puede aumentar literalmente el rendimiento y la producción hasta en un 50%.

El diseño se verificará mediante software de realidad virtual.
Tras el diseño del robot, se procederá a su ensamble, usando diversos tipos de uniones y materiales, fabricados mediante impresión 3D o mediante máquina CNC.
Una vez tengamos el diseño y la estructura, los alumnos y alumnas realizarán el procedimiento de instalación de los elementos mecánicos para que el robot pueda moverse.
Para que el robot pueda desplazarse, no se usará electricidad de la red, sino que los alumnos y alumnas calcularán e instalarán placas solares para que el robot sea autosuficiente, respetuoso con el medio ambiente y con ello consiguiendo un ahorro económico.
Para finalizar, mediante placas programables y programación en equipos informáticos, se creará un APP que realice mediante radiocontrol el movimiento del mismo.
AVANCES INTERMEDIOS
Actualmente se ha realizado la programación en Arduino del programa, la creación de la APP, el diseño de la estructura con Solidworks, verificación del diseño usando Realidad Virtual y la fabricación de del robot con impresión 3D.







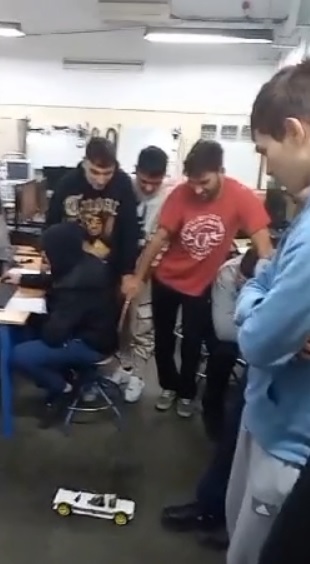
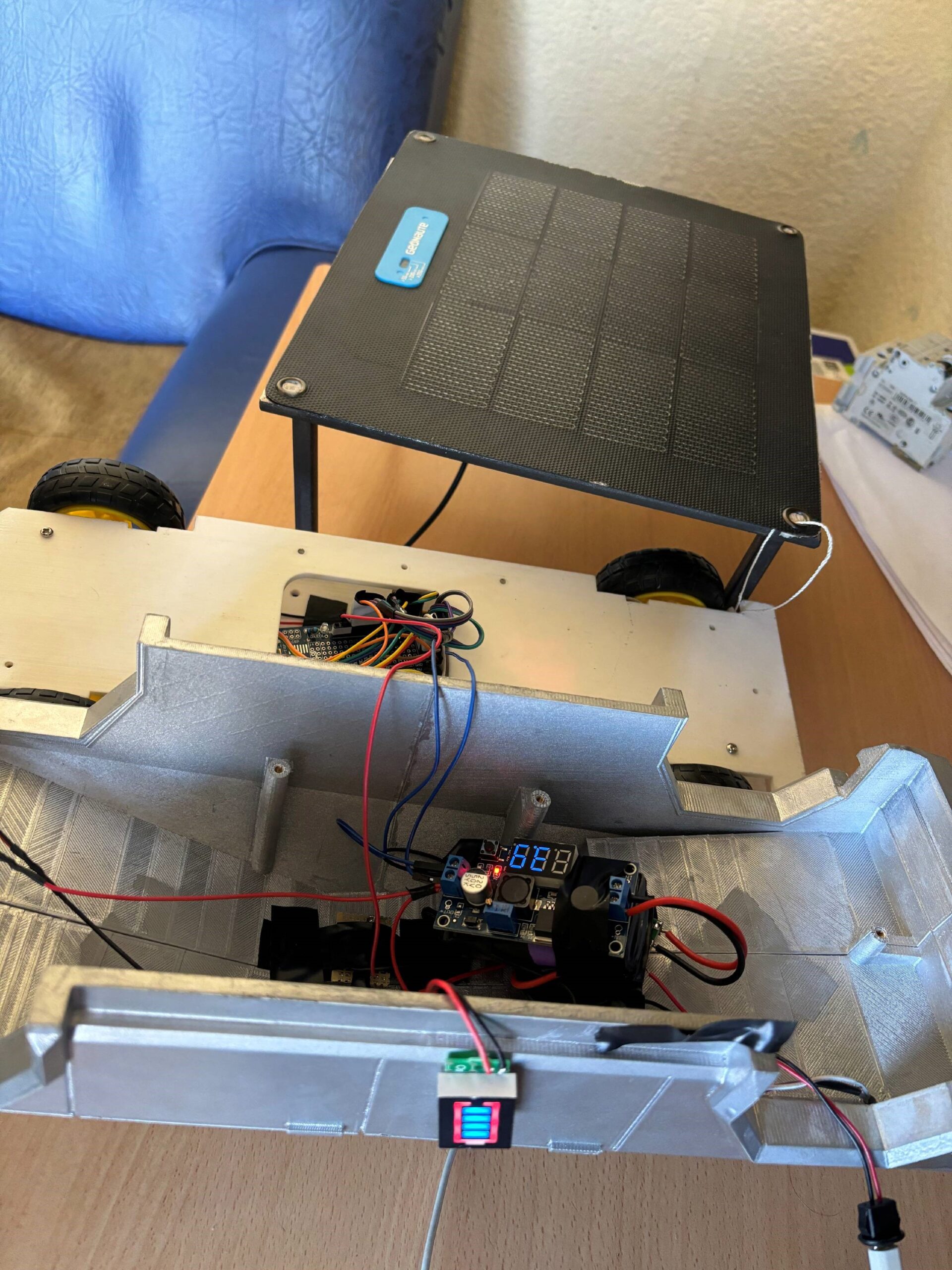
El Robot en esta fase todavía no es autosuficiente pero se han realizado pruebas electromecánicas para ver que funciona la programación y la APP.
Además, falta completar la estructura para que pueda soportar las placas solares. Se están realizando cálculos y pensando en posibilidades para la autogestión energética del mismo con placas solares. Puedes ver su funcionamiento en esta fase en el aula mediante este vídeo:
AVANCES FINALES
Tras el diseño y creación del robot en impresión 3D con diferentes tipos de plásticos y después de comprobaciones de las pruebas electromecánicas y verificar que gracias a la placa electrónica programada y la APP creada por los alumnos y alumnas el Polirobot funcionaba adecuadamente, faltaba por hacer que el robot fuera autosuficiente y los últimos detalles estructurales.



Por ello, en esta última parte del proyecto, los alumnos y alumnas participantes han realizado el cambio de batería por una que sea recargable mediante paneles solares. Una vez calculada la potencia, se han realizado las conexiones de la misma para que el panel solar pueda cargarla y mover el vehículo con indicador de la carga de batería.

Por otro lado, mediante mecanizado y soldadura TIG se ha realizado la estructura que soportará la placa solar fotovoltaica ya que se ha planteado que la estructura será una zona de carga del vehículo, tal y como es en la realidad y que el vehículo cargará debajo de la estructura. Aprovechando el mecanizado y soldadura, se ha realizado también una peana para presentar el Polirobot en ferias y exponer el mismo.


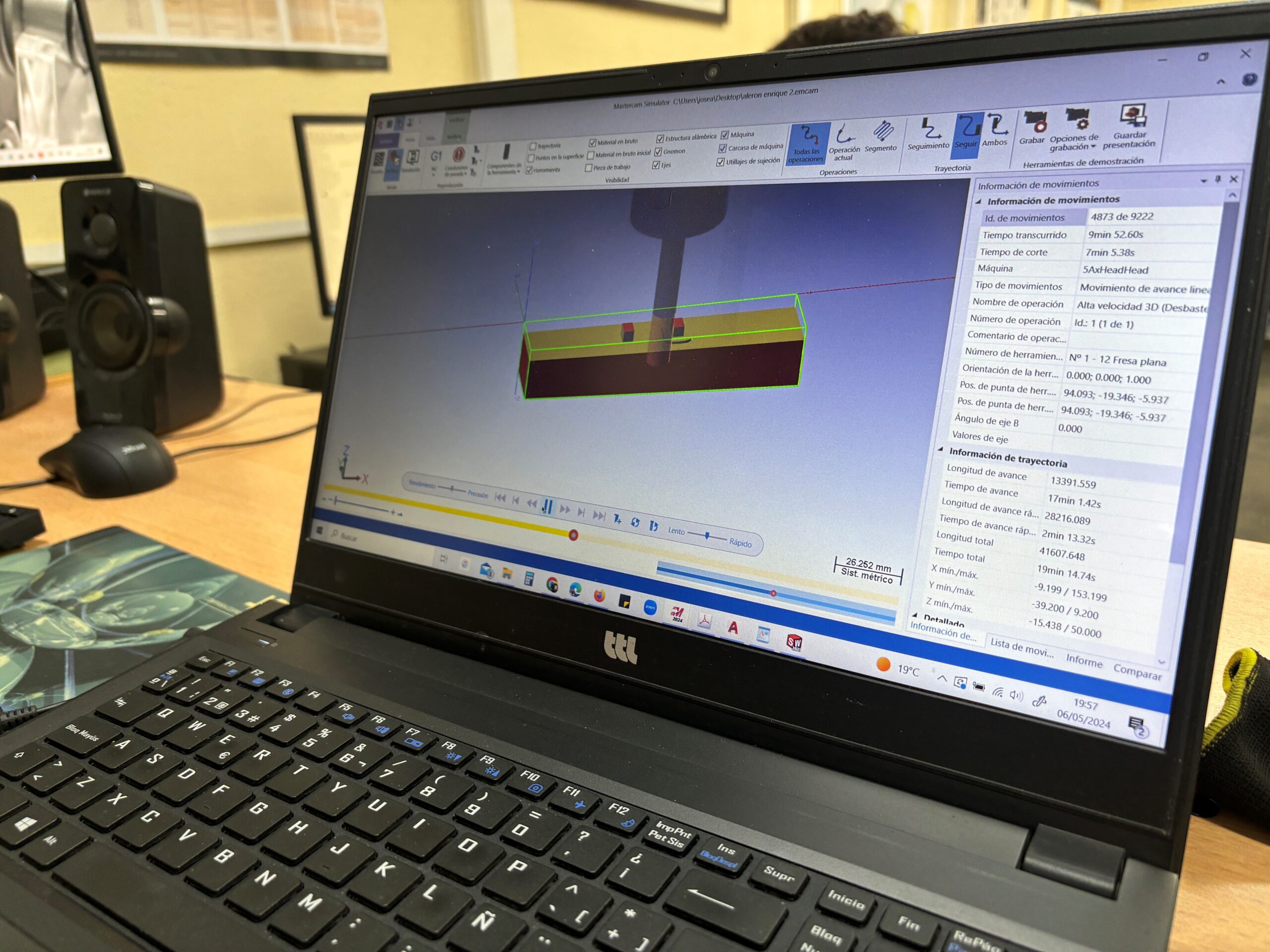
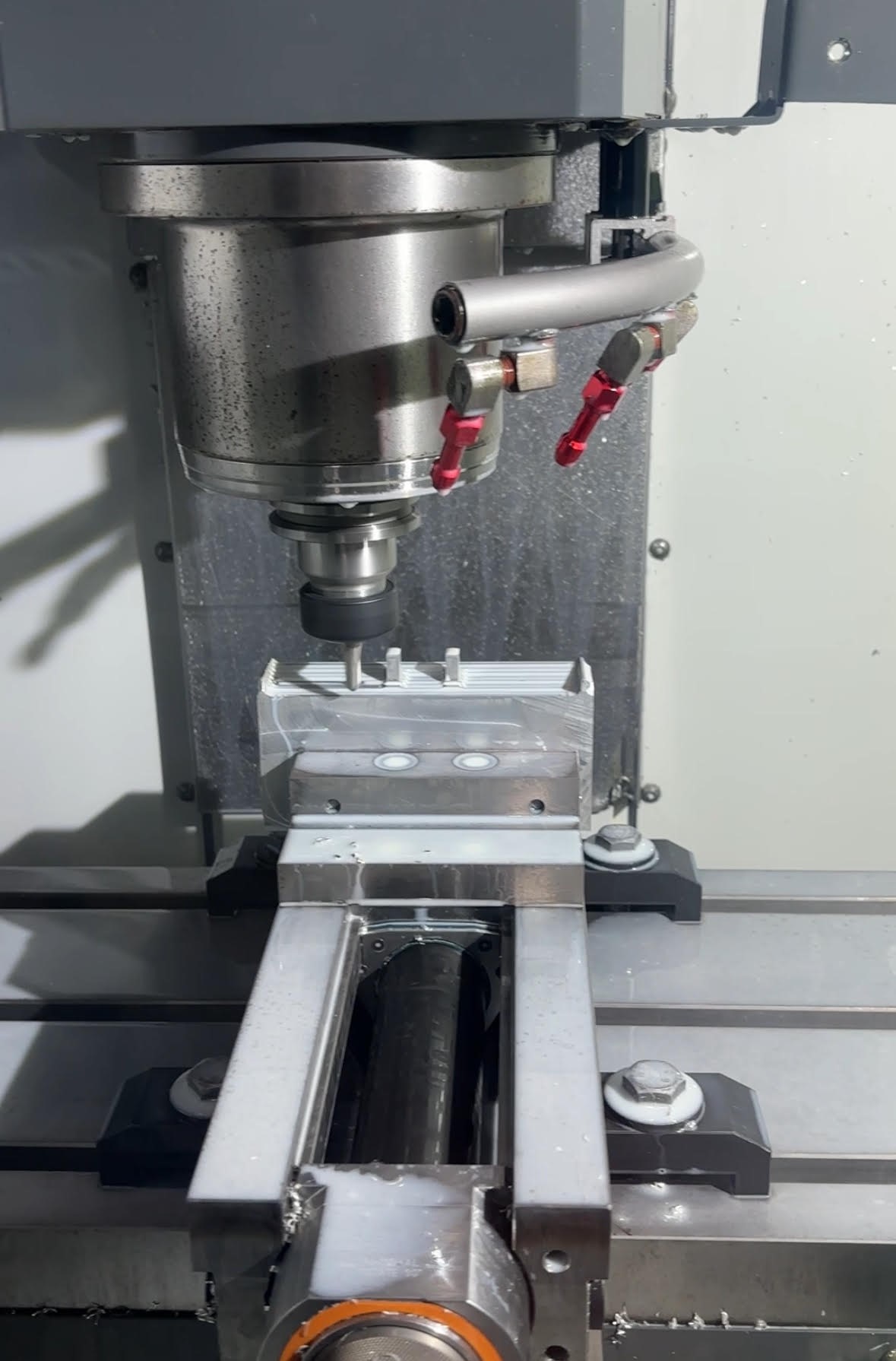
Para finalizar el proyecto, se ha utilizado el mecanizado por control numérico CNC para realizar un alerón para el vehículo. Para ello, primero se han realizado diversos diseños en Solidworks y se han fabricado varios prototipos usando varios plásticos como PLA y PVA.

Una vez se ha definido el diseño final, se ha realizado el postprocesado del mismo a código máquina usando el programa Mastercam y fabricado el alerón en aluminio, ya que, por su peso, se ha determinado que puede ser el material adecuado, usando la tecnolodía CNC.

CONCLUSIÓN
 Se trata de un proyecto que ha sido muy gratificante para el centro. En este proyecto ha trabajado alumnado de diversas edades y etapas educativas, creando un vínculo STEAM entre alumnos y alumnas con inquietudes y estudios diferentes, todo en un clima óptimo de trabajo en grupo y con un objetivo común.
Se trata de un proyecto que ha sido muy gratificante para el centro. En este proyecto ha trabajado alumnado de diversas edades y etapas educativas, creando un vínculo STEAM entre alumnos y alumnas con inquietudes y estudios diferentes, todo en un clima óptimo de trabajo en grupo y con un objetivo común.

Además, gracias al proyecto, se ha dado visibilidad a las nuevas tecnologías de las que disponemos en el centro y se ha aumentado el número de alumnos, alumnas y profesores y profesoras que han contado con ellas en las aulas este curso.
El proyecto ha sido presentado en la Feria de la Ciencia 2024, siendo un gran reclamo para los asistentes debido a su complejidad y creatividad.


Por otro lado, destacar también el traspaso de conocimiento que ha surgido entre los profesores y profesoras que han participado en el proyecto, lo cual ha sido tremendamente satisfactorio. Del proyecto actual han surgido 2 proyectos nuevos que se han solicitado para el curso que viene.
Finalmente, gracias a las experiencias y conocimientos obtenidos a través del proyecto, se ha gestado el intercambio de conocimiento en impresión 3D, realidad virtual, fabricación mecánica, diseño y programación con un instituto alemán con el que parte de los alumnos y alumnas participantes en el PoliRobot se encuentran inmersos en intercambios intercentros de proyectos Erasmus+ en el que se usan las tecnologías antes descritas para la fabricación de elementos.
En la segunda quincena de mayo gran parte del alumnado que ha trabajado en este proyecto intercambia experiencias con una acogida Erasmus+ de 10 alumnos y un profesor del centro Werner-von-Siemens Schule de Hildesheim (Alemania), fruto de visitas preparatorias job-shadowing realizadas en el mes de febrero y marzo en ambos centros por su y nuestro profesorado de formación profesional.



Impactos:
- El proyecto en su fase inicial recibió el interés y la atención de la Sra. Consejera en su visita al acto inaugural de conmemoración de los 75 años del centro en Los Remedios y 25 impartiendo Bachillerato el 1 de diciembre del 2023.
- El proyecto ha sido presentado en la Feria de la Ciencia 2024, siendo un gran reclamo para los asistentes debido a su complejidad y creatividad.
- En la segunda quincena de mayo gran parte del alumnado que ha trabajado en este proyecto intercambia experiencias con una acogida Erasmus+ de 10 alumnos y un profesor del centro Werner-von-Siemens Schule de Hildesheim (Alemania), fruto de visitas preparatorias job-shadowing realizadas en el mes de febrero y marzo en ambos centros por su y nuestro profesorado de formación profesional.
- Ha contribuido al fomento del interés por la robótica en alumnado de FP y de Bachillerato, así como la promoción de valores como el emprendimiento y trabajo en equipo.